Bellow Actuator Fab
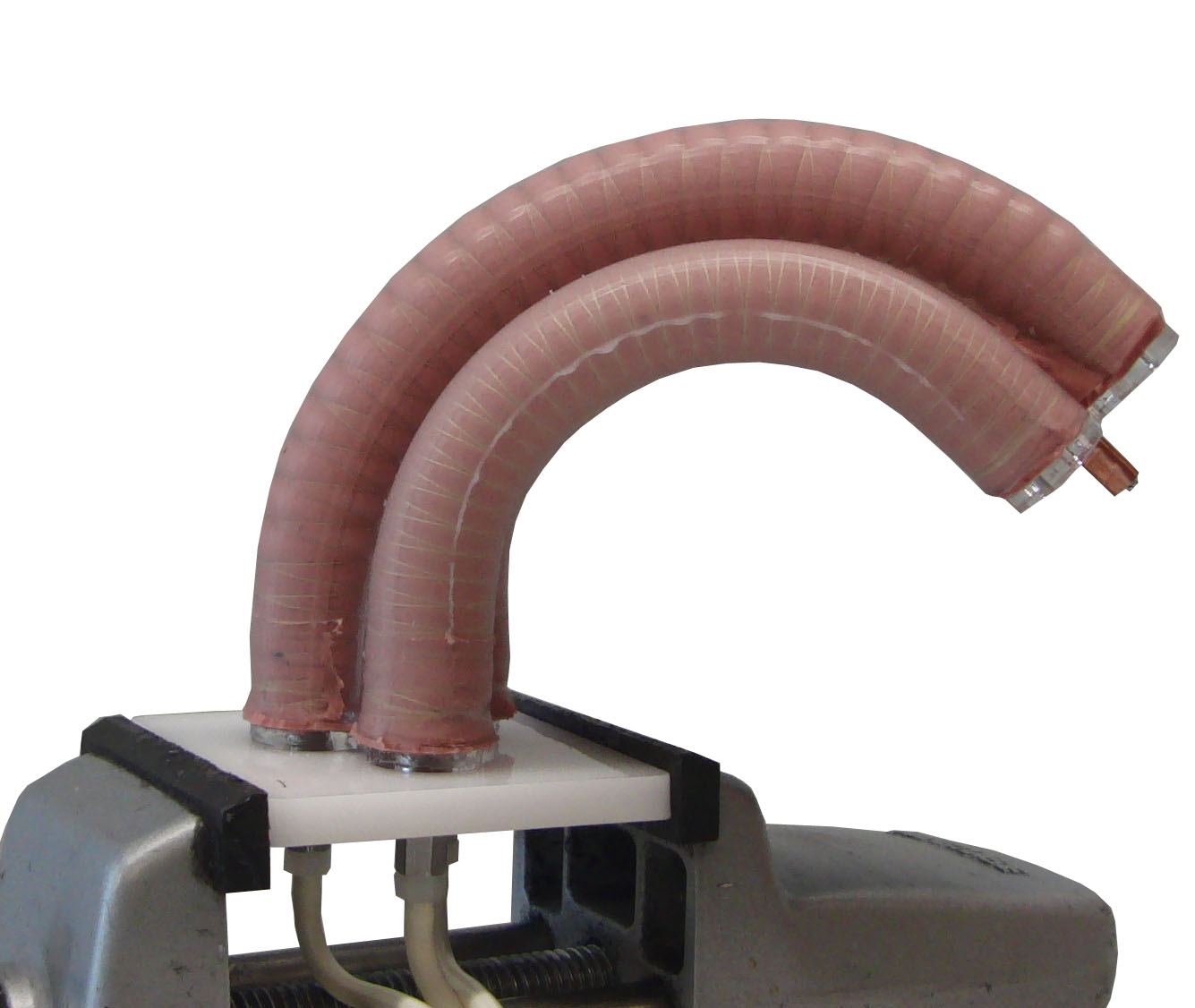
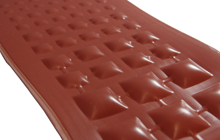
Introduction Bellows-type soft actuators are a common architecture that creates asymmetric motion by unfolding the excess material in the bellows. Compared to fiber-reinforced actuators where the elastomer material must strain…
Continue Reading
Bellow Actuator Fab