
This multi-degree-of-freedom soft actuator was an exploration project aimed at identifying techniques for molding multi-lumen fiber-reinforced actuators. In this particular example, I created three independent fiber-reinforced, tube-shaped, linear actuators (M4601 silicone by Wacker Chemical) from a 3D printed mold. These were left on the aluminum rods (which defined the inner diameter of the bladder), and inserted into a four part mold that was designed to equally space the linear actuators about a central axis to co-mold (Dragon Skin 20 silicone by Smooth-On) them together (see Fig. 1). Furthermore, the mold included a narrow aluminum rod that passed through the central axis to create a lumen in the final molded part. Figure 2 presents a view of the demolded part. Once the ends were capped, I passed a Bowden cable through the central lumen, which restricted actuator length extension and minimally impeded actuator bending.
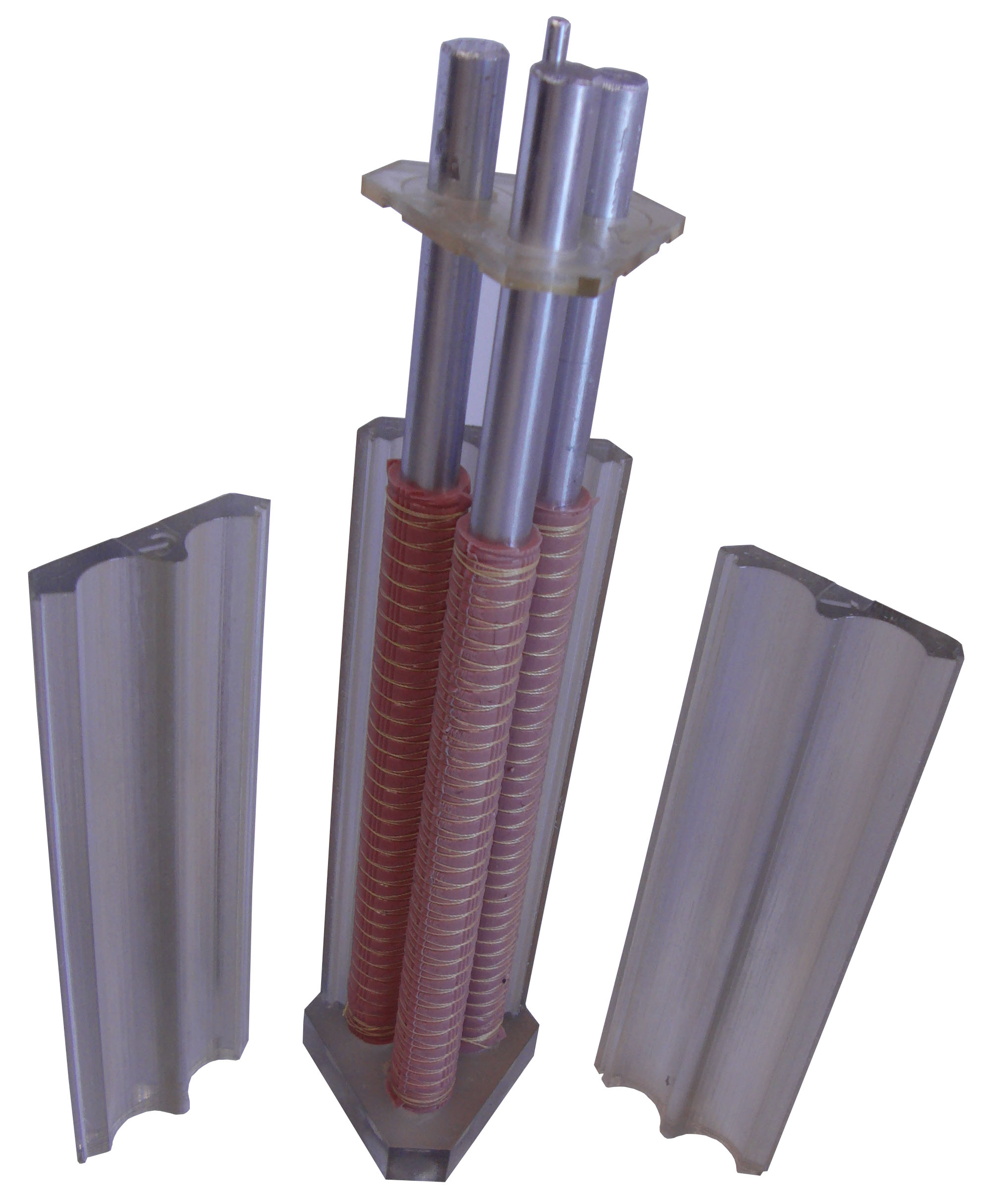
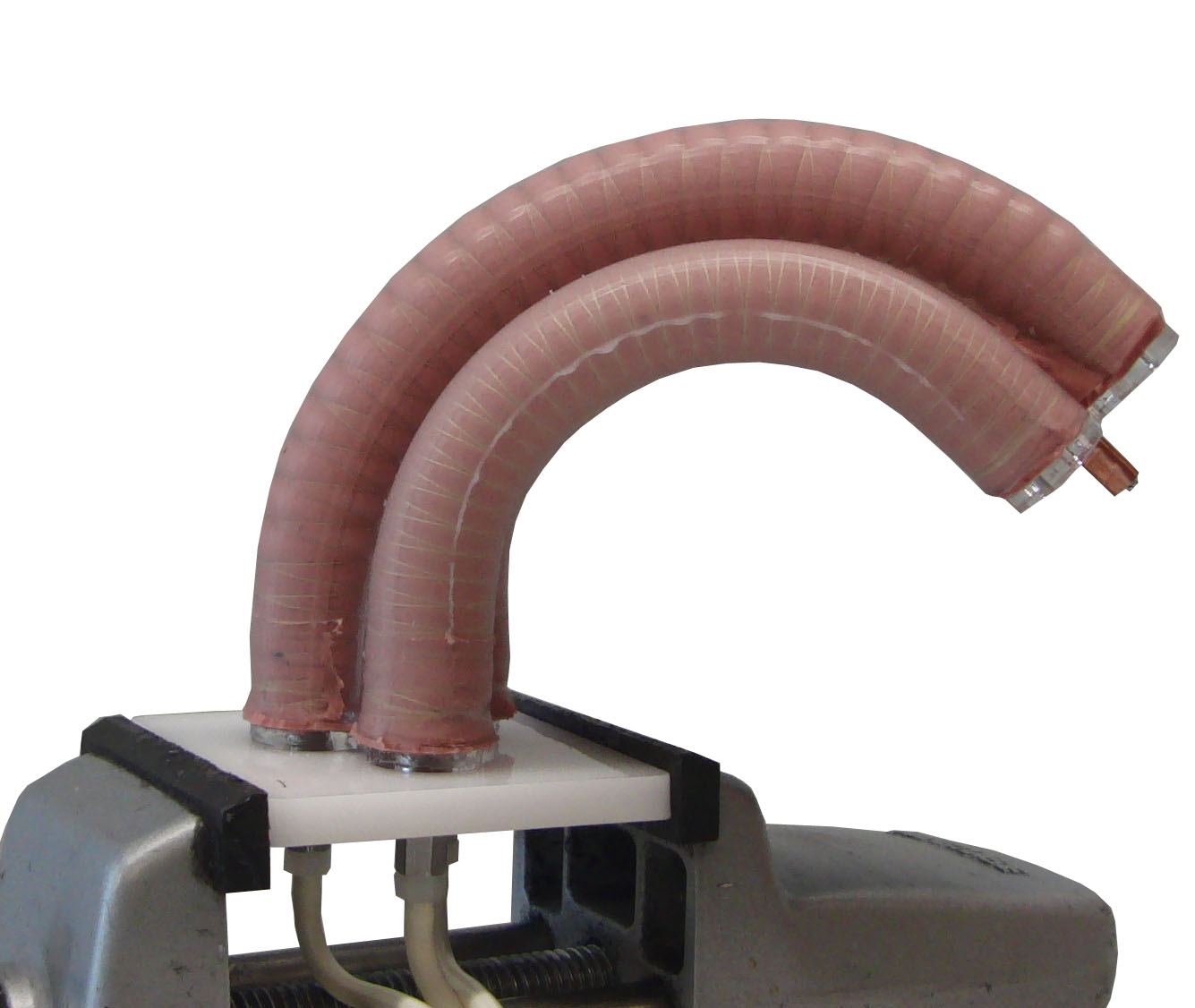
 Fig. 2 – Demolded three lumen fiber-reinforced soft actuator.
Fig. 2 – Demolded three lumen fiber-reinforced soft actuator.