At the NERD Laboratory the keywords — Nature-Inspired, Engineering, Robotics, and Design — summarize our work where we apply our expertise from numerous fields towards fundamental research, applied research, and product development. We collaborate across disciplines to explore challenges from a different perspective. Past projects have included legged robots, micro flapping robots, wearable assistive devices, and medical device development. Currently, we are exploring new sensing and control paradigms in soft robotics, robotic additive manufacturing for austere environments and Soldier-inspired innovation.
Janos Sztipanovits; (VUMC) Sean Collins, Tonia Rex,
Mark Wallace; (Peabody College) Laurie Cutting;
(Owen School) David Owens; (A&S) Andrew Coe,
John McLean
Evolutionary Approach to Optimal Morphology of Transformable Soft Robots
Sponsor: NSF Div. of Information and
Intelligent Systems
Collaborators: Isuru Godage (DePaul University),
Nicholas Cheney (University of Vermont)
Publications
Journal Articles
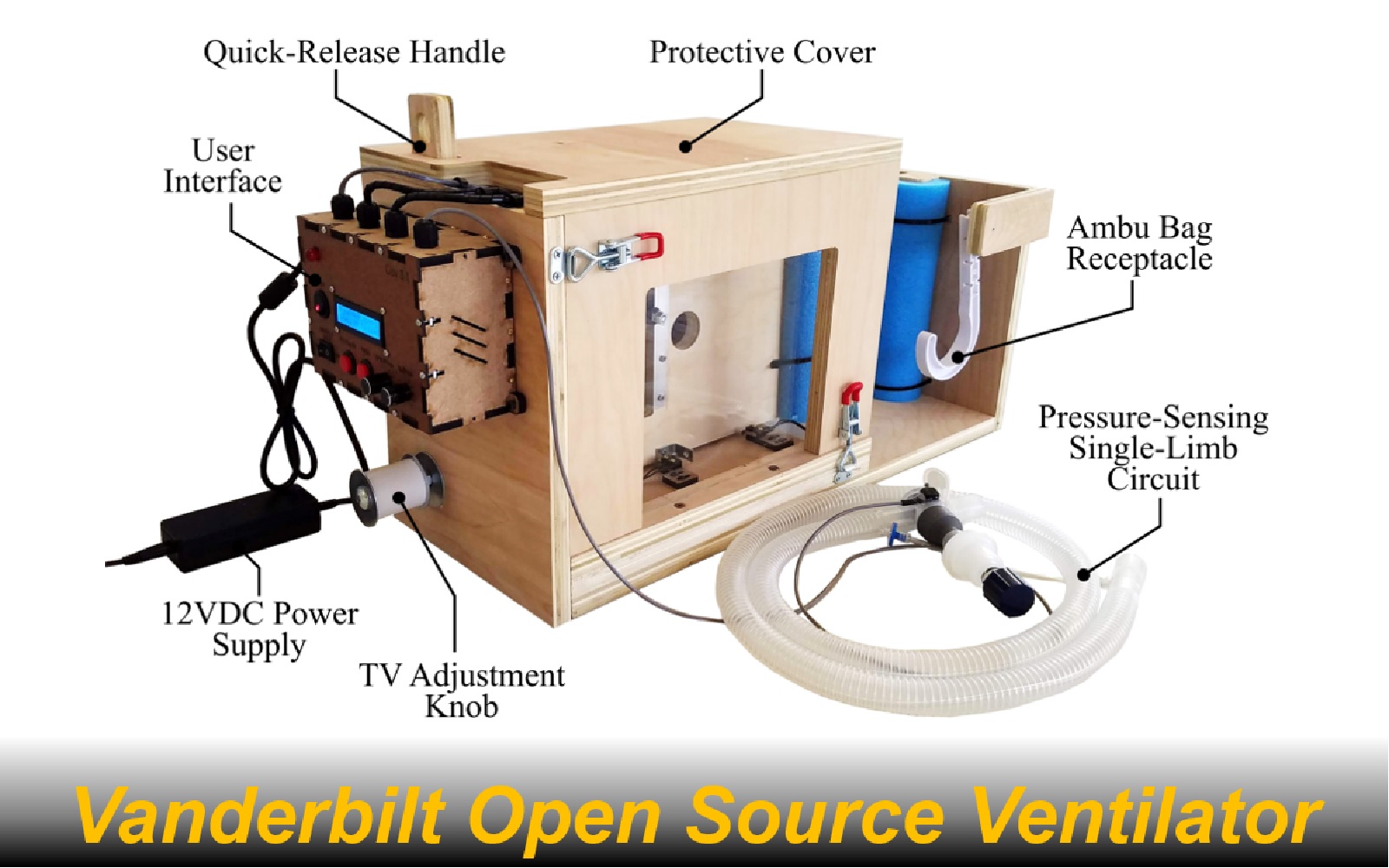
J. Gafford*, K.C. Galloway*, S. Webster, M. Emerson, K. Riojas, D. Ropella, A. Tumen, F. Maldonado, M. Bacchetta, E. Barth, D. Herrell, R. Webster III, “The Vanderbilt Open-Source Ventilator: From Napkin Sketch to Ready to Save Lives in 3 Weeks.” IEEE Robotics and Automation Magazine, (will be published in March 2021). *co-first authors
K. Neely, K.C. Galloway, Alvin Strauss, “Soldered Copper Lap Joints Using Reactive Material Architectures as a Heat Source.” Manufacturing Letters, vol. 24, 2020.
K. Neely, K.C. Galloway, Alvin Strauss, “Multi-Material Additively Manufactured Composite Reactive Materials via Continuous Filament Direct Ink Writing,” Advanced Manufacturing, 2020.
Y. Chen, L. Wang, K.C. Galloway, I. Godage, N. Simaan, E. Barth, “Modal-based Kinematics and Contact Detection of Soft Robots.” Soft Robotics, 2020.
B.T. Phillips, K. Becker, S. Kurumaya, K.C. Galloway, G. Whittredge, D. l Vogt, C.T. Teeple, M.H. Rosen, D.F. Gruber, R.J. Wood, “Dexterous Deep-Sea Soft Robotic Arms: A low-power soft manipulator for biological exploration.” Scientific Reports, 8:1, 2018.
L. Cappello, K.C. Galloway, S. Sanan, D. Wagner, R. Granberry, S. Engelhardt, F. Haufe, J. Peisner, C. Walsh, “Exploiting Textile Mechanical Anisotropy for Fabric-based Pneumatic Actuators.” Soft Robotics, 5:5, 2018.
K.C. Galloway, P. Polygerinos, R. Wood, C. Walsh, “Soft Robotic Glove for Combined Assistance and Rehabilitation During Activities of Daily Living.” Encyclopedia of Medical Robotics, Edited by Dr. Jaydev P. Desai, World Scientific Publishing Company, July 2018.
Refereed Conference Articles and Letters
Y. Chen, K. C. Galloway, and I. S. Godage, “Efficient Reduced-Order Models for Soft Actuators,” in Soft Robotic Modeling and Control: Bringing Together Articulated Soft Robots and Soft-Bodied Robots workshop, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018.
I.S. Godage, Y. Chen, K.C. Galloway, E. Templeton, B. Rife, I.D. Walker, “Real-time Dynamic Models for Soft Bending Actuators.” ROBIO, 2018.
T. Roche, M.A. Horvath, A.A. Nodeh, K.C. Galloway, N.V. Vasilyev, D.J. Mooney, F.A. Pigula, C.J. Walsh “Design And Fabrication Of A Soft Robotic Direct Cardiac Compression Device.” ASME IDETC/CIE, 2015.
Maeder-York, T. Clites, E. Boggs, R. Neff, P. Polygerinos, D. Holland, L. Stirling, K.C. Galloway, C. Wee, and C. Walsh, “Biologically Inspired Soft Robot for Thumb Rehabilitation,” Journal of Medical Devices, 8:020933, 2014.
A. Yasemin, K.C. Galloway, Y. Yazicioglu, D. Koditschek, “Modeling the Compliance of a Variable Stiffness C-Shaped Leg Using Castigliano’s Theorem,” ASME IDETC/CIE, 2010.
K.C. Galloway, R. Jois, M. Yim, “Factory Floor: A Robotically Reconfigurable Construction Platform,” IEEE ICRA, Anchorage, AK, 2010.