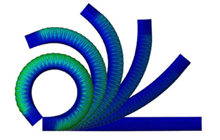
Abstract – Soft fluidic actuators consisting of elastomeric matrices with embedded flexible materials are of particular interest to the robotics community because they are affordable and can be easily customized to a given application. However, the significant potential of such actuators is currently limited as their design has typically been based on intuition. In this work, the principle of operation of these actuators is comprehensively analyzed and
described through experimentally validated quasi-static analytical and finite-element method models for bending in free space and force generation when in contact with an object. This study provides a set of systematic design rules to help the robotics community create soft actuators by understanding how these vary their outputs as a function of input pressure for a number of geometrical parameters. Additionally, the proposed analytical model is implemented in a controller demonstrating its ability to convert pressure information to bending angle in real time. Such an understanding of soft multimaterial actuators will allow future design concepts to be rapidly iterated and their performance predicted, thus enabling new and innovative applications that produce more complex motions to be explored.