“Squishy Fingers” on the Deep Reef
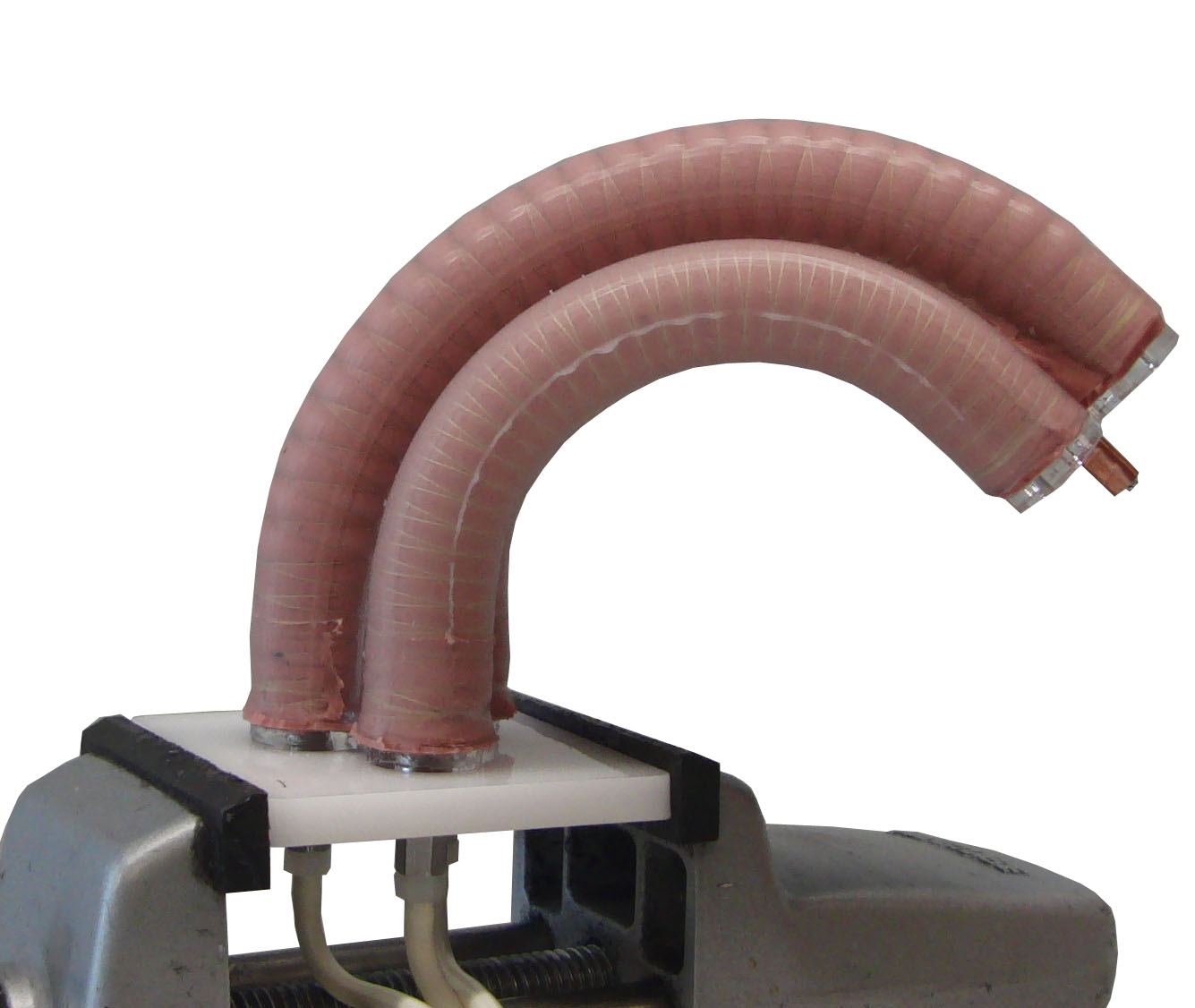
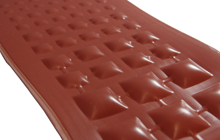
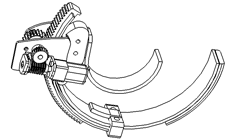
Summary—In this work (link to paper) we developed an underwater gripper that utilizes soft robotics technology to delicately manipulate and sample fragile species on the deep reef. Existing solutions for…
Continue Reading
“Squishy Fingers” on the Deep Reef